I wanted to create a device so that I would have assistance in identifying where my car should be parked in my ever-changing space in my car-park.
There are 2 constants:
- The walls, and
- the car.
I also had an Arduino sitting around doing nothing. I figured this would be a perfect little job for it and a sensor or two. I also figured it would be pretty simple device and a good way to learn about how to make something useful.
It took much longer than I thought it would. I think it was mostly because I wasn’t sure what I wanted until I considered the simplest idea for this.
My requirements:
- I don’t want to have wires running all over the garage.
- I don’t want to use batteries
- I want to use minimal sensors
- I want to be simply informed when I’m in the right spot within a certain tunable range
- It should be cheap to build (well mostly)
So, to address each of these:
- The sensor is a single distance sensor at the front of the parking area. LED lights can be close by.
- My outlets are at the front of the parking area, so I can use a power supply transformer.
- I found this: Sharp range sensor, so a single sensor could do it.
- 3 LEDs would do… too close (go back), just right (stop), too far (keep going).
- 3 LEDs, 1 Sharp range sensor, 1 220 ohm resistor, 1 5v transformer, 1 arduino (uno) => <$50
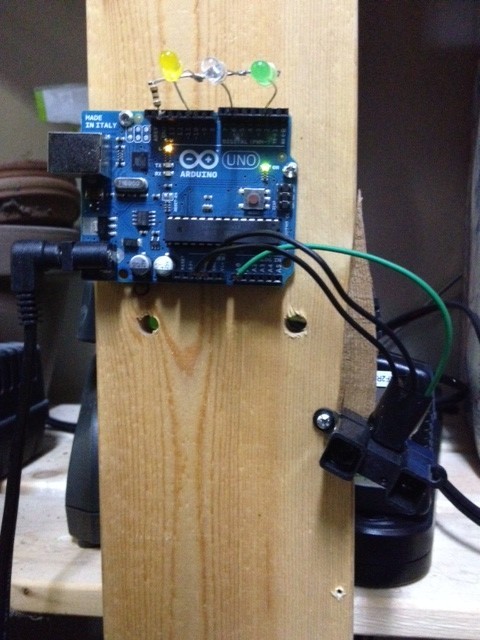
So my simple design is 3 LEDs arranged from top to bottom:
- yellow, too close, pin 2
- red, stop, pin 6
- green, keep going, pin 10
I only need 1 220 ohm resistor for the set of LEDs since only one will be on at a time anyway, and can be shared, and thus connected to the GND pin on the digitial input/output side of the Arduino.
I soldered the 220 ohm resistor on the end of a stiff wire. Next to that, about 1 cm along, the short lead (negative) of the yellow LED, then 1 cm further, the short lead of the red LED, and then about 1 cm further, the short lead of the green LED. These lined up approximately with the pins mentioned above… close enough.
On the other side of the Arduino is the analogue input/outputs where the distance sensor is wired directly. Since I didn’t get a jtag wire set with the sensor (stupidly) I soldered wires directly to the board. Not very elegant, but certainly cheap. There is a 5v power input wire, a GND wire, and a voltage out going to A0. Pinouts can be seen here: datasheet.pdf
A close-up photo:
The functioning system in a video:
and now the code:
<br />
/*<br />
Parking Assistant Using Range Sensor<br />
Created by Mark Slemko - October 5, 2013</p>
<p> Parts taken from: http://arduino.cc/en/Tutorial/AnalogInput</p>
<p> refined 2015-10-17<br />
- adjusted to accomodate shorter distance<br />
refined 2021-01-31<br />
- adjusted to clarify code, clean up, and to work on arduino pro mini</p>
<p>*/</p>
<p>#include <math.h>
#include <SoftwareSerial.h><br />
SoftwareSerial Serial7Segment(8, 9); //RX pin, TX pin</p>
<p>int pingPin = 2; // select the input pin for the potentiometer<br />
int ledPin = 13; // select the pin for the LED</p>
<p>int colorR = 7;<br />
int colorGnd = 6;<br />
int colorG = 4;<br />
int colorB = 5;</p>
<p>int settleTime = 5000; // when same value is reached for this time, stop checking as often<br />
int recheckTime = 0;<br />
int timer = 0;<br />
double settleDistance = 0.0;<br />
double variance = 2.0;</p>
<p>#define STOP_DISTANCE 70.0<br />
#define STOP_BRACKET 6.0<br />
#define MAX_RECHECK_TIME 2000<br />
#define NORMAL_RECHECK_TIME 100</p>
<p>#define SENSOR_ACTIVE 250.0<br />
#define SENSOR_TOO_CLOSE 20.0</p>
<p>#define LED_ACTIVE_PING_INDICATOR_TIME 10</p>
<p>void setColor( int r, int g, int b) {<br />
digitalWrite(colorGnd, LOW);<br />
digitalWrite(colorR, r);<br />
digitalWrite(colorG, g);<br />
digitalWrite(colorB, b);<br />
}</p>
<p>void setup() {<br />
// declare the ledPin as an OUTPUT:<br />
pinMode(ledPin, OUTPUT); </p>
<p> pinMode(colorR, OUTPUT);<br />
pinMode(colorGnd, OUTPUT);<br />
pinMode(colorG, OUTPUT);<br />
pinMode(colorB, OUTPUT);</p>
<p> setColor(LOW, LOW, LOW);</p>
<p> Serial.begin(9600);<br />
Serial7Segment.begin(9600); //Talk to the Serial7Segment at 9600 bps<br />
Serial7Segment.write('v'); //Reset the display - this forces the cursor to return to the beginning of the display<br />
}</p>
<p>long microsecondsToCentimeters(long microseconds)<br />
{<br />
// The speed of sound is 343 m/s or 29 microseconds per centimeter.<br />
// The ping travels out and back, so to find the distance of the<br />
// object we take half of the distance travelled.<br />
double cm = (double)microseconds / 58.32; // 29.16 * 2 us<br />
return (long)cm;<br />
}</p>
<p>long sonicPing() {<br />
long duration, cm;</p>
<p> pinMode(pingPin, OUTPUT);<br />
digitalWrite(pingPin, LOW);<br />
delayMicroseconds(2);<br />
digitalWrite(pingPin, HIGH);<br />
delayMicroseconds(10);<br />
digitalWrite(pingPin, LOW);<br />
delayMicroseconds(20);<br />
// The same pin is used to read the signal from the PING))): a HIGH<br />
// pulse whose duration is the time (in microseconds) from the sending<br />
// of the ping to the reception of its echo off of an object.<br />
pinMode(pingPin, INPUT);<br />
duration = pulseIn(pingPin, HIGH) - 350;<br />
Serial.print(duration);<br />
Serial.print("us ");<br />
cm = microsecondsToCentimeters(duration);</p>
<p> return cm;<br />
}</p>
<p>void loop() {<br />
// read the value from the sensor:<br />
double distance = sonicPing();<br />
Serial.print(distance);<br />
Serial.print("cm ");</p>
<p> // display the distance<br />
char tempString[10]; //Used for sprintf<br />
sprintf(tempString, "%4d", (int)distance); //Convert deciSecond into a string that is right adjusted<br />
Serial7Segment.print(tempString);</p>
<p> // give visual indication that a ping occurs<br />
digitalWrite(ledPin, HIGH); // turn the ledPin on<br />
delay(LED_ACTIVE_PING_INDICATOR_TIME); // stop the program for a few milliseconds to show a ping just occurred<br />
digitalWrite(ledPin, LOW); // turn the ledPin off:<br />
Serial.print(" wait ");</p>
<p> bool settledTimeReached = checkSettleTimeReached(distance);<br />
timer += NORMAL_RECHECK_TIME; // increment timer</p>
<p> // check if settle time reached to turn off LED<br />
if (settledTimeReached) {<br />
// turn off LED<br />
setColor( LOW, LOW, LOW);</p>
<p> recheckTime = timer;<br />
if (recheckTime < settleTime) {
if (recheckTime > MAX_RECHECK_TIME) {<br />
recheckTime = MAX_RECHECK_TIME;<br />
}<br />
} else {<br />
timer = recheckTime = settleTime;<br />
}</p>
<p> // turn off RGBLED<br />
setColor( LOW, LOW, LOW);<br />
} else {<br />
recheckTime = NORMAL_RECHECK_TIME;</p>
<p> setColor( LOW, LOW, LOW);<br />
if (shouldShowStopLED(distance)) {<br />
if (distance < (STOP_DISTANCE - STOP_BRACKET)) {
// too close - blue on
setColor( HIGH, HIGH, HIGH);
Serial.print(" too close ");
} else if (distance > (STOP_DISTANCE + STOP_BRACKET)) {<br />
// too far - green on<br />
setColor( LOW, HIGH, LOW);<br />
Serial.print(" too far ");<br />
} else {<br />
// perfect - red on<br />
setColor( HIGH, LOW, LOW);<br />
Serial.print(" stop ");<br />
}<br />
}<br />
}</p>
<p> Serial.print(" delay recheck ");<br />
Serial.print(timer);<br />
delay(recheckTime); // wait for next check</p>
<p> Serial.println("");<br />
}</p>
<p>boolean shouldShowStopLED(double distance) {<br />
//abs(distance - STOP_DISTANCE) < (variance * (1.0 + distance / 50.0)) + (STOP_BRACKET * 2)) {
if ( abs(distance) < SENSOR_ACTIVE && abs(distance) > SENSOR_TOO_CLOSE) {<br />
return true;<br />
}<br />
return false;<br />
}</p>
<p>boolean checkSettleTimeReached(double distance) {<br />
boolean delta = abs(settleDistance - distance) > (variance * (1.0 + distance / 100.0));</p>
<p> // if the delta is too big, reset the timer<br />
if (delta) {<br />
timer = 0;<br />
}</p>
<p> if (timer < settleTime) {
settleDistance = distance;
return false;
} else {
return true;
}
}
Notes:
- The power supplied via the USB cable connected to a computer changes the result of the output coming from the sensor.
- The formula for determining the distance is fairly accurate using the USB power, however, the values are 'stretched' using the power supply through the 5v transformer.
- The LEDs suck quite a bit of power, and without the current limiting resistor, the LEDs draw more than the power supply can provide and keep the arduino powered
- The LEDs when they turn on changes the power supply's voltage/current levels affecting the measurement of distance
- A 5v transformer is not enough power for the arduino, and need to use a bigger one. A 12v one is used and restores the distance measurements to be far more accurate and stablizes the circuit.
Problems:
- The sensor reading is quite variable as the distance grows, and I'm not sure how to reduce the variability. Is it related to the power supply ripple? Or it's own circuit power draw?
Update - Feb 1:
I got an Arduino Pro Mini, which is sufficient for this purpose (and quite a bit cheaper), to test the idea that the issues with the distance variability is related to loose wiring or power supply ripple. I've discovered a couple of things during my minor update:
- Soldering the wiring did improve the stability a little.
- The measurements using the IR Distance Sensor variability was minimal in my work area.
- Aiming the IR Distance Sensor at the headlights produced horrible distance measurements
- By chance I aimed the IR Distance Sensor at the license plate with similarly horrible distance measurements. So I re-aimed the Sensor at the hood as before, which improved things immensely
- I washed my car and to my surprise, the IR Distance Sensor produced quite variable distance measurements.
- When the sun is in direct line of the IR Distance Sensor, it cannot get a proper reading at all. Much like the sun shining in your eyes... hopelessly unable to 'see'.
I found that all of the specular issues for the IR Distance Sensor quite amusing. I didn't expect that the effect would be so dramatic with regard to the material, or rather the paint job. It was kind of funny that my dirty car reduces the problem slowly over time encouraging me to not wash it. So, I'm looking for a different, and perhaps better sensor for this purpose. I was really hoping that the IR Sensor would work because it is kind of cool, but I could repurpose it for something else I'm sure.














